| Команды движения КМР в свободном пространстве |
Команды движения в свободном пространстве в КМР реализуются с использованием информации датчиков углов шарниров. 
1. Команда Free Move – движение в свободном пространстве в целевую точку
По команде Free Move (FOR) КМР перемещается из текущего положения в целевую точку (TAF). Одна команда Free Move вызывает движение КМР между двумя точками и не включает промежуточных узловых точек. Движение по команде Free Move может включать линейные перемещения, вращения или одновременно линейные перемещения и вращения. Линейные перемещения осуществляются по прямым линиям. Вращательные движения включают разворот ЕЕ вокруг оси тангажа и вокруг оси крена BAF. Выполнение команды Free Move осуществляется в три этапа: разгон от нулевой до заданной скорости за заданное время, движение с постоянной заданной скоростью и торможение до нулевой скорости (остановка КМР).
При выполнении команды Free Move на пульт управления передается информация о текущем реальном положении КМР (“pose” – координаты TIP относительно BAF в BAF) и расстоянии от FOR КМР до целевой точки (TAF) - DЕLTA. Положение КМР в пространстве определяется с использованием процедуры прямой кинематики. Команда Free Move исполняется в автоматическом режиме и входит в состав соответствующей AS. Исходные данные для выполнения всех команд Free Move (координаты целевых точек, скорости перемещения, времена разгона и торможения) в ФМС фиксированы.
2. Команда Jog – движение в заданном направлении
По этой команде FOR КМР выполняет движение с заданной скоростью по одной из 6 декартовых координат CDF (3 линейные координаты и 3 угловые координаты). Выбор этой координаты осуществляет оператор КМР. Помимо имени координаты должны быть указаны:
- - СК TAF;
- - СК FOR;
- - тип командной СК (CDF), вдоль (вокруг) одной из осей которой задается движение: «внутренняя CDF» или «внешняя CDF»;
- - линейная (угловая) скорость перемещения (вращения) FOR.
В отличие от Free Move команда Jog выполняется в ручном режиме.
3. Команда Step – перемещение на шаг в заданном направлении
По этой команде КМР выполняет перемещение на заданную (небольшую) величину (величина шага перемещения 10 мм, вращения 1 гр. для данной версии ФМС) по одной из 6 декартовых координат (3 линейные координаты и 3 угловые координаты) FOR. Выбор этой координаты осуществляет оператор КМР. Помимо имени (номера) координаты должны быть указаны: СК TAF, СК FOR, линейная (угловая) скорость перемещения (вращения) FOR.
Команда Step выполняется в ручном режиме.
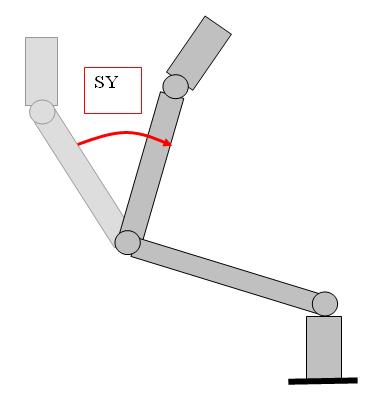
4. Команда Single Joint Jog – движение в заданном шарнире в заданном направлении.
Эта команда вызывает движение в выбранном шарнире в выбранном направлении с заданной скоростью. Команда Single Joint Jog исполняется в ручном режиме. Исполнение команды может быть прервано с помощью команд Soft Emergency Stop.
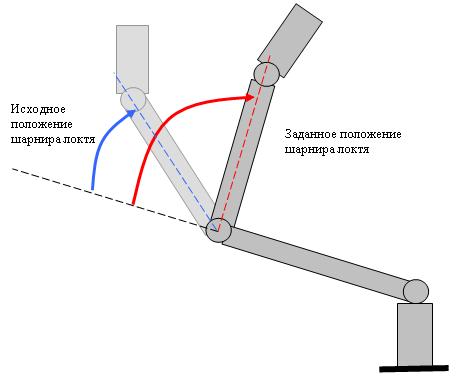
5. Команда Single Joint Move – движение в одном из выбранных шарниров.
Эта команда вызывает движение в выбранном шарнире из исходного положения в заданное. По аналогии с командой Free Move выполнение команды Single Joint Move включает следующие фазы: разгон от нулевой скорости вращения до заданной; вращение шарнира с постоянной скоростью; торможение.
Команда Single Joint Move исполняется в автоматическом режиме и входит в состав соответствующей AS.
6. Команда Pitch Move – одновременное движение в шарнирах тангажа плеча, локтя и кисти
Эта команда вызывает одновременное движение в трех шарнирах тангажа. Движение происходит из исходного положения в заданное. Заданное положение определяется координатами всех трех шарниров.
По аналогии с командой Free Move выполнение команды включает фазы разгона, движения с постоянной скоростью и торможения. При этом движение в шарнирах начинается и заканчивается одновременно.
Команда Pitch Move исполняется в автоматическом режиме и входит в состав соответствующей AS.
7. Команда Soft Emergency Stop – программный останов
По этой команде КМР в ФМС останавливается за счет мгновенного «замораживания» сигналов на входах и на выходах приводов. Замораживание входов соответствует переводу приводов в режим удержания текущего положения,а замораживание углов шарниров – включению тормозных муфт приводов. После выполнения команды Soft Emergency Stop КМР может продолжать движения, обусловленные упругими деформациями звеньев.
|